
|
Normal Forms Methods |
|
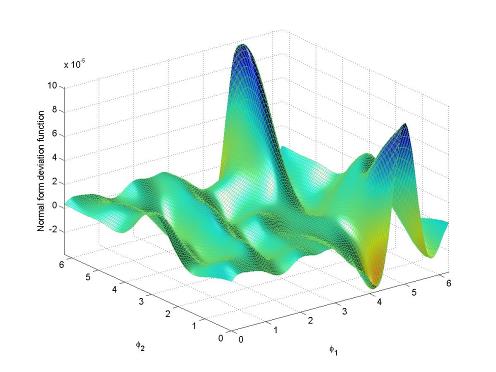
The polynomials that generate the normal form pictures can be found below in two versions, one consisting of polynomials of order five, the other of polynomials of order ten. The normal form defect function has the form
D = I (A P B ) - I
Where I is a single polynomial in six variables, and A, P, and B each are six polynomials in six variables that are composed. The total of 19(=1+6+6+6) polynomials are listed consecutively, in the order I, A1 … A6, P1 … P6, B1 … B6.
|


|
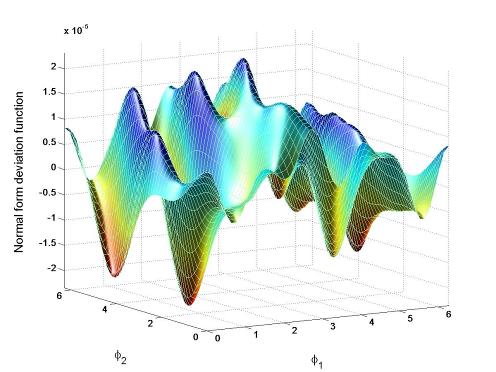
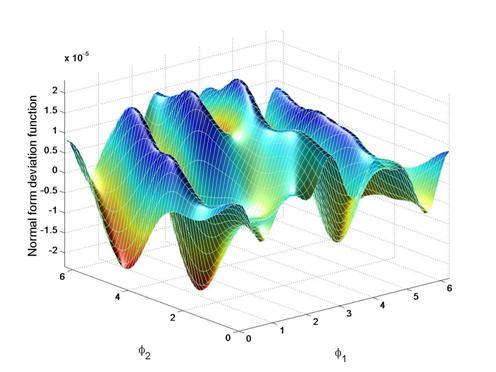
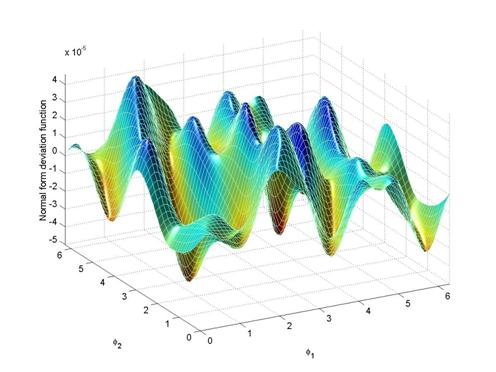
Normal form methods are a very useful tool for the study of the local dynamics of nonlinear systems around fixed points. In particular, the so-called normal form defect function, which describes the evolution of an approximate invariant of the motion, provides significant insight into the dynamics. If the function can be proven to be strictly less than zero over a given domain, it constitutes a Lyapunov function, and the system is guaranteed to be stable. For Hamiltonian systems or other volume-preserving systems, the normal form function is never strictly zero; but the magnitude of its usually very small positive bound allow to put rather extended bounds on stability times of the dynamics. The pictures show the resulting information for the following four cases: |